
Related projects
Proj – 04 – transformer
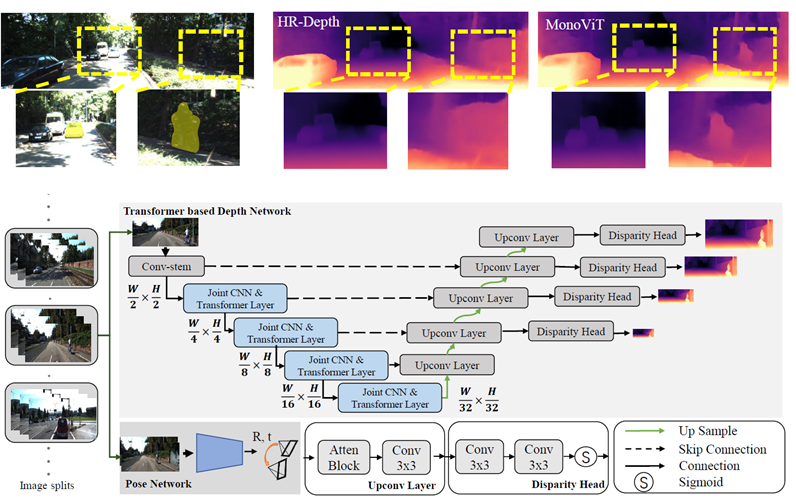
MonoViT: Self-Supervised Monocular Depth Estimation with a Vision Transformer (paper) Chaoqiang Zhao, Youmin Zhang, Matteo Poggi, Fabio Tosi, Xianda Guo,Zheng Zhu, Guan Huang, Yang Tang, Stefano Mattoccia
International Conference on 3D Vision, 2022
- Improving the self-supervised monocular depth estimation by using a transformer.
Proj – 03 – domain adaptation
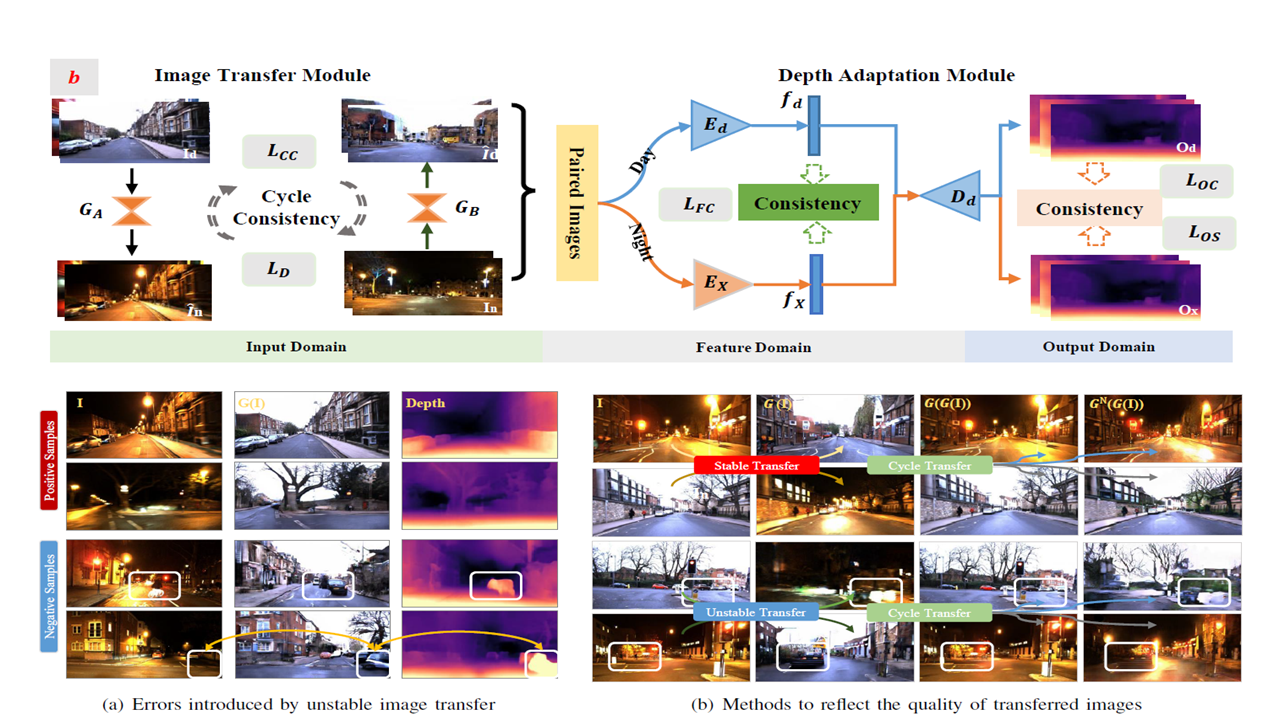
Unsupervised Monocular Depth Estimation in Highly Complex Environments (paper) Chaoqiang Zhao, Yang Tang, Qiyu Sun
Accepted by IEEE Transactions on Emerging Topics in Computational Intelligence, 2022
- Using domain adaptation to tackle the problem of unsupervised monocular depth estimation in complex environments, like night and rainy night.
Proj – 02 – visual odometry
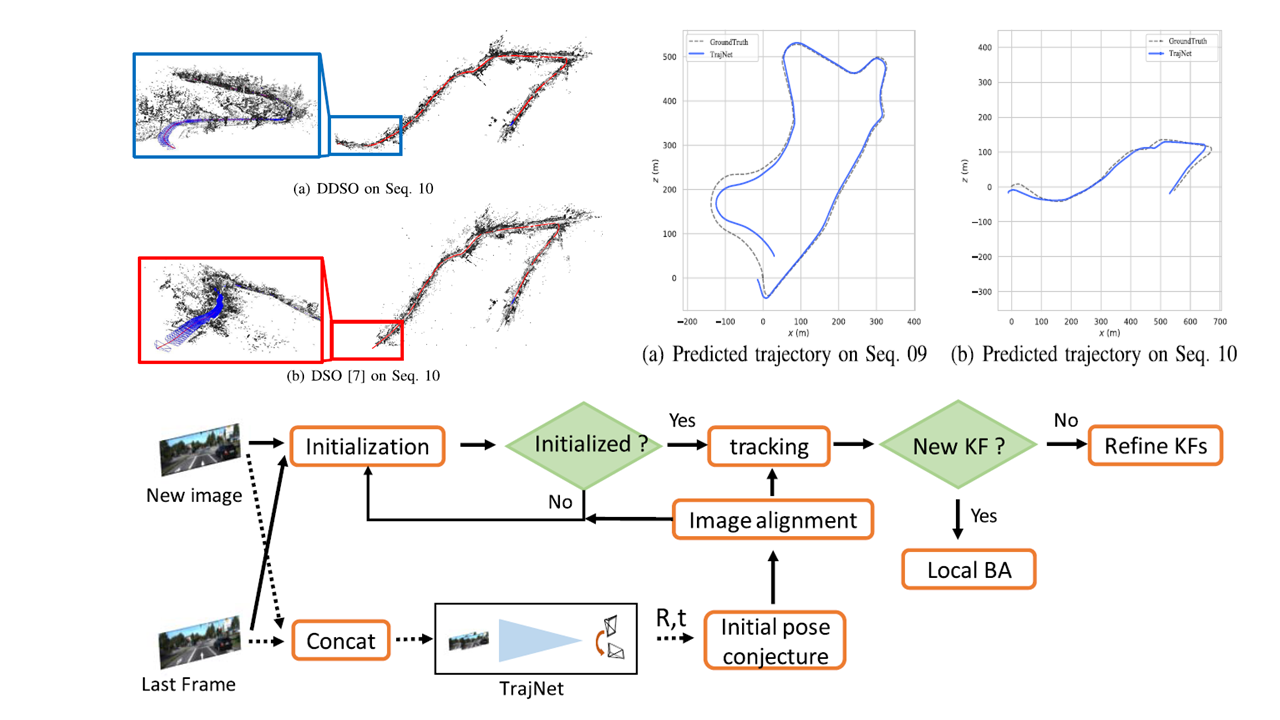
Deep direct visual odometry (paper) Chaoqiang Zhao,Yang Tang, Qiyu Sun, Athanasios V Vasilakos
IEEE Transactions on Intelligent Transportation Systems, 2021
- Introducing deep neural pose estimation into traditional DSO framework for robust initialization and accurate tracking.
Proj – 01 – adversarial learning
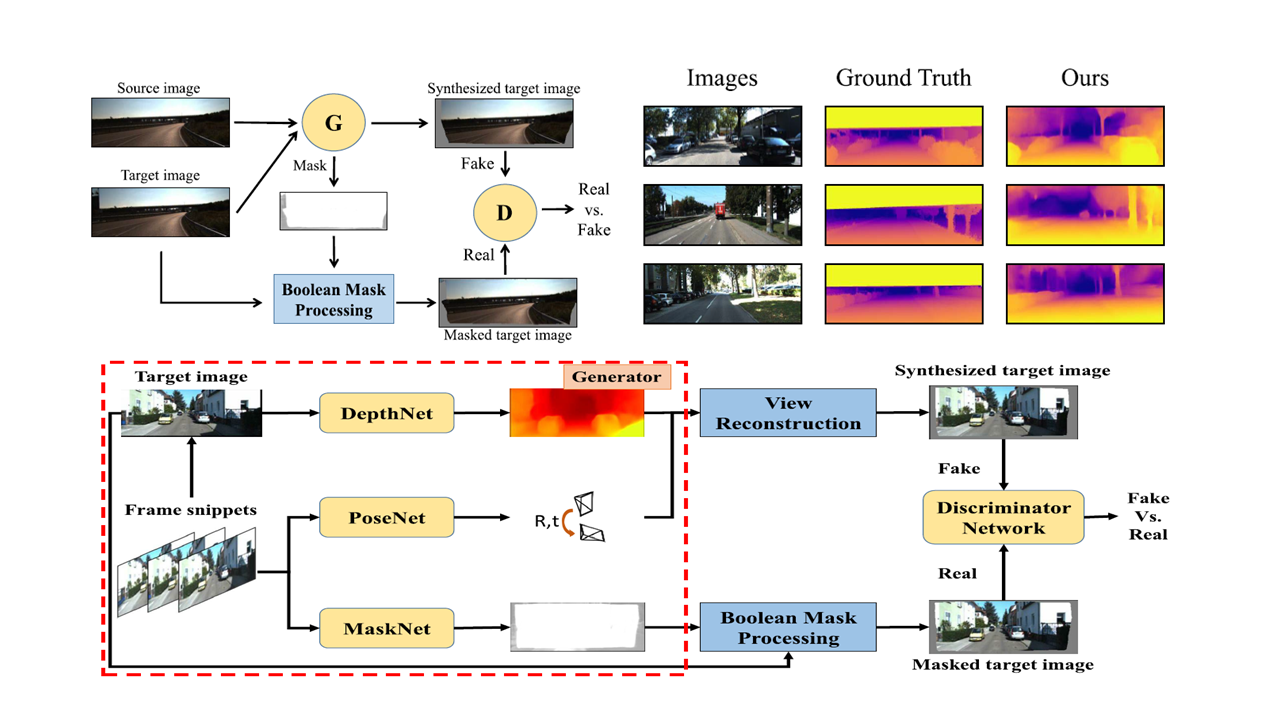
Masked GAN for unsupervised depth and pose prediction with scale consistency (paper) Chaoqiang Zhao, Gary G Yen, Qiyu Sun, Chongzhen Zhang, Yang Tang
IEEE Transactions on Neural Networks and Learning Systems, 2020
- Improve the adversarial loss used in unsupervised monocular depth estimation framework.